Company
Research History
2021
-
2021
- 마이크로로봇(Type-B) 개발과 의료적 검증을 위한 동물실험 진행
- 마이크로로봇 직선 운동 생성, 약물전달, 혈전흡입을 위한 2차 피딩로봇 시제품 개발
- 마이크로로봇의 혈관내 주행을 위한 상용 C-arm X선 조영기기의 평면 X선 사진으로부터 3차원 혈관지도 생성 기술 개발
- 3차 자기 구동시스템, 2차 피딩로봇 및 마이크로로봇 한국산업기술시험원(KTL) 시험평가 ∙ 성능검증 완료
- 캡슐내시경 이동 및 자세제어를 위한 자기구동시스템 (C-RAMAN) 개발
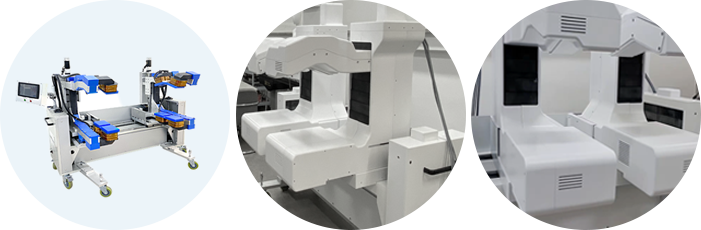
자기 구동시스템

2차 피딩로봇

마이크로로봇 B

C-RAMAN
2020
·
2018
-
2020
- 마이크로로봇(Type-A) 개발과 의료적 검증을 위한 동물실험 진행
- 고자기장 출력과 병원 내 사용 시 이동이 가능한 경량의 I-RAMAN 시스템 시제품 개발 완료
- 2차 자기 구동시스템 및 마이크로로봇 한국산업기술시험원(KTL) 시험평가 ∙ 성능검증 완료
-
2019
- 보건복지부 마이크로로봇실용화기술개발사업 선정(I-RAMAN system 연구)
- 세계 최초 마이크로급(3 Fr) 직경을 갖는 마이크로로봇 개발 성공
-
2018
- 한국기계기술단체총연합회 ‘올해의 10대 기계기술’ 선정
- 마이크로로봇 직선 운동 생성을 위한 1차 피딩로봇 시제품 개발 성공
- 혈관내 유무선 혈관구동을 위한 2차 자기 구동시스템 시제품 (세계 최고 자기장 세기 생성 가능) 개발 성공

한국산업기술시험원(KTL) 시험성적서

2018 올해의 10대 기계기술 선정

첫번째 피딩로봇 시제품

2차 자기 구동시스템 시제품
2017
·
2012
-
2017
- 14 mT급 9,000 rpm 고속 회전자기장 생성기술 개발 성공
-
2016
- 산업통상자원부 로봇핵심기술개발사업 선정 (자기 구동시스템 및 마이크로로봇 연구)
-
2015
- 한국연구재단 중견연구자지원사업 후속연구 선정 (자기 구동시스템 및 마이크로로봇 연구)
-
2013
- 자기장으로 움직이는 마이크로로봇 개념 증명을 위한 1차 자기 구동시스템 개발 성공
-
2012
- 회전자기장을 이용한 마이크로로봇 연구가 미국 물리학회 (American Institute of Physics) 우수 연구로 선정,
국제학술뉴스에 연속 4건 이상 보도됨 - 한국연구재단 중견연구자지원사업 후속연구 선정 (자기 구동시스템 및 마이크로로봇 연구)
- 회전자기장을 이용한 마이크로로봇 연구가 미국 물리학회 (American Institute of Physics) 우수 연구로 선정,

1차 자기 구동시스템 시제품

미국 물리학회 우수 연구 선정 및 국제학술뉴스 보도
2008
자기장으로 움직이는 마이크로로봇 개념 개발과 자기 구동시스템 및 마이크로로봇 연구 시작